The question of how to create more than just simple angular shapes from sheet materials caught my interest quite a few years ago when I built my first plywood-sheathed boat. To visualize the problem I was facing, I first used a flashlight to project the shadow of a wire of various curvatures and orientations onto a flat screen, a crude form of conic projection. Then I realized that if I could model the curved wire mathematically, the same thing could be done in abstract space with highly accurate results. From this, I developed an approach that has worked well for me and, to my knowledge, hasn’t been described elsewhere. I hope to describe it here to learn whether anyone else is using a similar approach or if anyone might benefit from it. Instead of attempting a comprehensive description (which would put everyone to sleep), I’ll go through a sample design (for the boat I am now using) which illustrates the approach while ignoring details.
The technique does not require a drafting board or a computer. An inexpensive pocket calculator is the minimum equipment needed. The approach relies on two simple concepts: First, a chine description is created from which you can pick off many closely-spaced exact offsets. I use mathematical relationships to do this (think trajectory or parabolic curve), but any method which results in multiple well-distributed exact offsets is adequate. Second, for any line in a three-dimensional x-y-z coordinate system, as we move along such a line the changes in x, y, and z are proportional to each other according to the slope.
Thus, if we know the change in one coordinate, we can calculate the change in the other two coordinates. By calculating the new coordinates of many exact points when projected into a different plane, we can derive the offsets for as many transverse sections as desired, create another chine, describe the entire length of the keel, and establish the sheer. A table of accurate offsets is the first result; then the hull sections can be drawn or sketched on graph paper to visually confirm what has been created. I use X to designate length starting at the forward end of the chine; Y designates width from the center line; and Z is the height above base, usually selected as the lowest point on the keel.
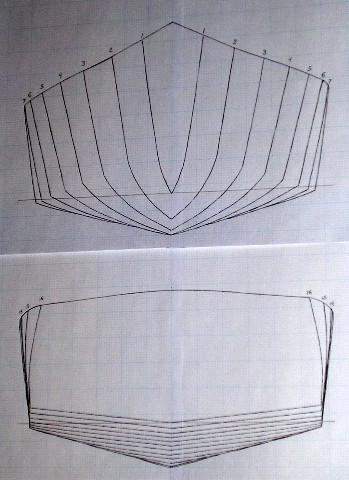
Bottom: With some idea of the desired length, beam, displacement and other characteristics of the proposed hull; the forward chine is created. For our example hull {see related drawing}, a few of the offsets starting at the bow are (0, 0, 20.25), (14, 6, 17.25), (28, 11.6, 14.45), (42, 16.4, 12.05), until we reach (119, 28.5, 6) at the point of maximum beam. A parabolic relationship is convenient to use, but other mathematical relations may be preferred depending on the purpose. Integrate the equation and you can calculate the length of the curve or a section of it; differentiate the equation and you can calculate the slope at any point.
For this example, it was convenient to calculate offsets every 7 inches; that could be doubled to every 3.5” if necessary but commonly provides more data than needed. The point of maximum chine beam when projected to establish the keel coordinates becomes the lowest point on the keel. Several different types of projections could be used. I chose a parallel projection (constant slope) instead of a conic projection because, for this situation, the differences were small. The parallel projection is also easier to work with and minimizes severe localized curvature. I set the lowest point on the keel to be located at (63, 0, 0). The bow half angle, desired deadrise, and type of hull play a part in choosing this point.
Realizing that a unique line can be defined by a point and a slope, each offset on the chine gives us a point, and the slope to be used is the difference between the maximum beam at the chine (119, 28.5, 6) and lowest keel point (63, 0, 0); that difference is 56/28.5/6.0. We know Y=0 at the keel; thus, we can calculate the values of X and Z for each chine offset when projected to the keel or center line. A plot of these coordinates provides the keel shape {see area B1}. Similarly, we can find the offsets for all planned frames by using the established values of X for each frame (i.e. 14, 28, 42, etc.) and solving for Y and Z. Dividing the X:Y:Z slope by 4 reduces it to 14/7.125/1.5 which simplifies computations with changes coinciding with most frame intervals.
Having completed offsets for the forward portion of the bottom, the midsection is defined next {see area B2}. For a variable deadrise hull, a conic projection for the midsection helps reduce deadrise aft. This can be done by creating a short curve with the desired slopes at the keel; then creating a proportionally larger/longer parallel version of the same curve (in this case, twice as big) to extend the chine aft. Finding the apex of this cone is not necessary; it is enough to know that proportional parallel curves are part of a conic development. Continuing aft, the keel Z coordinate will increase more rapidly than for the chine because it achieves its end slope sooner; thus, the deadrise will diminish producing a flatter run. At the aft end of these curves the keel and chine have parallel slopes which are then extended by straight lines to the stern to produce a straight run of constant deadrise {see area B3}. For this hull, the deadrise is about 60 degrees at the bow, 20 degrees six feet aft, and 5.7 degrees at the stern. For a constant deadrise hull this entire paragraph can be omitted; the keel and chine are simply extended aft as straight lines.
Topsides: Locating an apex for conic development of the hull side laterally in line with the bow half-angle results in a plumb bow profile. Moving the apex further laterally creates more flare to the bow section. By moving the apex moderately laterally the bow profile angle can be matched to the rise of the forefoot of the keel, avoiding a knuckle in the profile {see area S1}. Vertically the apex should be located high enough above the proposed sheer level to avoid any localized severe curvature to the sheer. Longitudinally, the apex should be approximately halfway between the bow and midpoint, adjusted forward or aft depending on where you want maximum topsides flare. After trying out a few alternatives, I settled on locating the apex at (63, 40.5, 66). Because any two points also can be used to define a unique line, using this apex and the series of chine offsets, many lines can be projected and their intersections with proposed frame locations in the anterior hull calculated.
Because a tumblehome stern was desired, a new apex for conic development was established closer to the sheer line once development from the previous apex reached the midsection. The new apex was connected by a common ruling line to the previous apex in a segment of slight curvature preventing transitional distortion of the hull surface in this area. Using the new apex, conic development was continued to the aft end of the chine curvature {see area S2}. This apex also provides one point, and the series of chine offsets provide second points so that many unique lines are defined. For each line, its intersections with every applicable frame location can be calculated to any desired exactness.
The initially established chine offsets, used to create the bottom, do not have to be used as the final chine position. In this case, aft chine is tapered through using a new curve to define the topsides. In creating a tumblehome stern, the aft chine, instead of being a straight line, is modified by a calculated curve bending toward the midline {see area S3}. As with the original chine, exact offsets are calculated every 7 inches, but this new curve extends in abstract space about six feet past the proposed stern. For projection from this new curve, the slope established by the last ruling line connecting the amidships apex with the aft end of the chine curve was used. Thus, this is a parallel projection. For the tumblehome stern, we are using one known point and a defined constant slope. Choice of projections depends on the desired result.
Deck: Because the deck curvatures were to be determined independently from the hull, several possible deck configurations could be constructed depending on the desired boat character and planned usage. After considering the alternatives, I elected to use a fairly simple cambered deck. A transverse deck curve of the desired camber and defined offsets (2.5“camber in a 40” long curve) was created. This curve was projected fore and aft mainly by parallel projection except for those areas where a planned open cockpit would allow slight longitudinal curvature to be incorporated without creating compound curvature. Y offsets were held constant while Z offsets changed slightly to reflect the fore and aft curvature.
The final determination of the sheer location is thus defined as the intersection of the deck surface with the hull topsides. Since both are fair surfaces, the sheer will also be fair. Note that a cambered foredeck, if projected to the bow, will result in a slight "powderhorn" shape at its sheer intersection with the topsides. If that shape is unacceptable, "powderhorn" curvature can be reduced by reducing foredeck camber or using a chosen Z coordinate profile for the sheer and departing from a true developable shape in the foredeck. Because foredeck camber is comparatively minor, distortion will be minimal.
With the shape finalized, I made one final modification. I elected to change the X spacing from 7” increments to 6.75” increments. This shortened the overall hull length by 8.125” to about 18 ½ feet overall. No frame offsets were affected by this change; however, the anterior keel will need to be redrawn due to changed X dimensions.
Summary: At this point all that has been created is a boat-like shape. Many steps remain in creating a complete boat design. However, the only goal here was to demonstrate a method of mathematical projection to create desired developable shapes with more complexity than just a few simple curves. Developable hull surface design can be a logical sequential process focusing on one portion of the hull at a time. Using an initial set of exact offsets for a chine and some algebraic relations, a highly accurate set of offsets for an entire hull can be created. Conic, parallel and planar projections can be combined to create multiple contours in a single, fair developable surface. Modifications can be made, or alternative shapes considered, by changing mathematical coefficients and recalculating resulting values only for those parts affected. Accurate drafting skills and/or complex computer software are not essential.
Creating a form in abstract space removes physical restrictions on scale or degree of curvature. Routinely, dimensions are calculated to at least 0.01” accuracy, and many are exact. Curvatures are fair; no lofting to detect inaccuracies is required. Accurate dimensions are used to create drawings rather than the reverse sequence. A plan can be communicated using only sketches and a table of offsets/dimensions.